
 |
对人类驾驶员而言,判断自身位置和车道只需扫一眼导航、瞄一眼车道线,但对自动驾驶汽车来说,这需要实现米级到分米级的精准度、全场景的稳定性、无间断的连续性—— 毕竟任何定位偏差都可能导致车道偏离、碰撞等危险。自动驾驶汽车通过 “多传感器感知 + 数据融合 + 高精地图匹配” 的三重协同,才能稳稳回答 “我在哪、在哪个车道” 的核心问题。

一、感知基础:多传感器联手 “摸清环境”
自动驾驶汽车的 “定位感官” 由多种传感器组成,各自分工又互为补充,共同采集位置与环境信息:
1. 卫星定位:提供全局绝对位置
-
核心设备:GPS、北斗、GLONASS 等全球卫星导航系统(GNSS); -
基础能力:输出车辆经纬度、高度,原始精度约 3-10 米,无法满足车道级需求; -
精度提升:通过差分技术(DGNSS)、实时动态定位(RTK)、星基增强系统(SBAS) ,将精度提升至亚米级(0.1-1 米)甚至分米级(0.01-0.1 米); -
局限与应对:在高楼林立(信号遮挡)、立交桥下(多路径反射)、隧道内(信号丢失)等场景易失效,需依赖其他传感器补位。
2. 惯性与里程传感器:维持短期稳定
-
惯性测量单元(IMU):内置加速度计和陀螺仪,能快速捕捉车辆姿态变化(转弯、倾斜)和加速度,短时响应快、稳定性高,但长时间使用会产生 “漂移误差”; -
车轮里程计 / 车速传感器:通过记录车轮转动圈数计算行驶里程,辅助修正位置,但轮胎打滑、磨损导致的直径变化会影响准确性; -
核心作用:卫星信号中断时(如进入隧道),可短期(几秒到十几秒)维持定位连续性,避免 “瞬间失忆”。
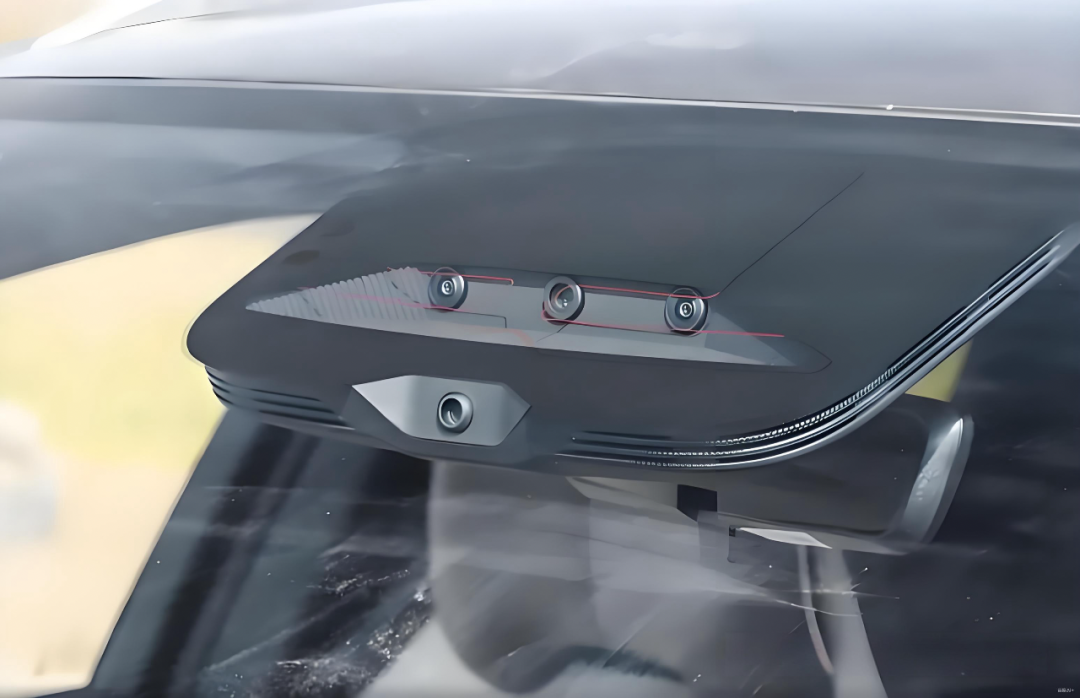
3. 视觉与激光传感器:捕捉道路局部特征
-
摄像头:核心优势是识别语义信息,能精准捕捉车道线、路缘、交通标志、地面标识等,是判断 “所在车道” 的关键;局限是对光照(强光、黑夜)、天气(雨雪、雾霾)、镜头污渍敏感; -
激光雷达(LiDAR):通过发射激光束测量周围物体的三维距离,生成高精度点云数据,可提取道路几何特征(如车道宽度、路缘高度),不受光照影响;局限是雨雪雾天气会降低点云质量,成本相对较高。
二、数据融合:把 “杂乱信息” 变成可靠位置
单一传感器数据存在误差或局限,需通过 “传感器融合” 技术整合所有信息,输出最优定位结果:
1. 核心融合算法:过滤噪声、修正误差
-
卡尔曼滤波系列:包括扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF),核心作用是融合高频短期信息与低频绝对信息—— 用 IMU、里程计的高频数据(100-1000Hz)维持实时姿态,用卫星定位的低频数据(1-10Hz)校正 IMU 漂移,实现 “稳定 + 精准” 的平衡; -
粒子滤波(蒙特卡洛定位):适合非线性、非高斯噪声场景,尤其在地图匹配时表现出色,通过大量 “粒子” 模拟车辆可能位置,逐步收敛到最优解; -
分层融合架构:底层用 IMU 做即时状态传播,中层用里程计、视觉 / 激光里程信息施加短期约束,高层用卫星定位或地图匹配做全局校准,兼顾实时性与精度。
2. 关键前提:时间同步与空间标定
-
时间同步:不同传感器的数据采集频率不同(如 IMU 1000Hz、摄像头 30Hz、卫星定位 1Hz),需通过 PPS 信号、PTP 网络时间协议等,将所有数据对齐到同一时间戳,否则会出现 “信息错位”; -
空间标定:确定各传感器在车体坐标系中的位置和朝向(如摄像头安装角度、激光雷达与 IMU 的相对位置),标定误差会直接导致定位错误,需通过标定板、静态点云配准等流程严格校准。
3. 不确定性管理:给定位 “打可信度分”
融合算法不仅输出位置,还会给出置信度(或协方差) —— 比如 “当前定位精度 0.3 米,置信度 95%”。当置信度低时(如隧道内卫星信号丢失、暴雨天摄像头失效),上层系统会自动采取保守策略:降低车速、加大跟车距离、增强环境感知,避免因定位不准引发风险。
三、车道级定位:高精地图 + 实时匹配的 “精准锁定”
卫星和惯性传感器能确定 “在哪条路”,但要精准到 “哪条车道”,必须依赖高精地图和地图匹配技术:
1. 高精地图:提供厘米级道路 “说明书”
高精地图是车道级定位的核心参考,精度达厘米级,包含关键信息:
-
车道细节:车道中心线、车道边界、车道宽度、车道类型(左转 / 直行 / 右转)、车道拓扑关系(如路口车道衔接); -
道路特征:路缘、斑马线、交通标志、地面标识(停止线、导向箭头)、路面坡度 / 曲率; -
核心价值:即使传感器暂时无法捕捉车道线(如标线褪色),也能通过地图中的车道拓扑,结合车辆相对位置,推断所在车道。
2. 地图匹配:让车辆 “对号入座”
将实时传感器数据与高精地图对比,修正位置偏差,常见方式有:
-
激光雷达点云匹配:用迭代最近点(ICP)、正态分布变换(NDT)等算法,将当前激光点云与地图中的道路点云 / 网格配准,精准修正车辆位姿; -
视觉特征匹配:提取摄像头捕捉的路缘、地面标识、建筑物轮廓等特征,与地图中的视觉标记或语义信息对比,确定车道位置; -
车道线跟踪匹配:通过摄像头检测实时车道线,结合多帧跟踪算法,估计车辆相对于车道中心线的横向偏差(如偏离 0.2 米)和航向角误差,再与地图中的车道线对齐,明确 “在车道内的具体位置”。
3. 地图失配应对:不依赖 “过期说明书”
道路施工、临时管制、标线褪色等情况会导致地图与现实不符,此时系统会:
-
优先信任实时传感器:当摄像头检测到的车道线与地图不一致时(如施工封闭某车道),以传感器实时数据为准; -
启动异常检测:识别地图与现实的差异,及时调整定位策略,避免错误匹配。
四、极端场景:无地图或信号丢失时怎么办?
当地图缺失(如未覆盖的乡间小路)或卫星信号完全失效(如长隧道),车辆会启动 “应急定位方案”:
1. 即时定位与地图构建(SLAM)
-
核心逻辑:同时估计自身位姿和增量构建局部地图,通过 “回环检测”(识别曾经过的场景)减少累积误差,实现无地图环境下的定位; -
技术分支:视觉 SLAM(依赖摄像头特征点跟踪)、激光 SLAM(依赖点云配准),适合短距离无地图场景(如地下车库、施工路段)。
2. 视觉 / 激光里程计:维持相对定位
-
视觉里程计:跟踪相邻帧图像的特征点或光流,估计车辆相对运动,结合 IMU 可短期维持定位; -
激光里程计:通过连续帧点云配准计算相对位移,抗光照变化能力强,适合恶劣天气下的短期补位。
3. 冗余与降级策略:确保安全底线
-
传感器冗余:即使某一种传感器失效(如激光雷达故障),仍可通过摄像头 + IMU + 里程计的组合维持基础定位; -
软件降级:当定位置信度极低时,车辆会进入 “退化模式”—— 减速行驶、增大横向容错空间、避免变道,必要时提示人工接管;完全无人场景下,会缓慢驶离主路,停靠至安全区域。 -
五、定位的最终价值:支撑决策与控制
定位不是目的,而是自动驾驶决策和控制的基础:
-
给规划模块提供依据:明确车辆在车道内的位置、未来几百米的车道拓扑(如前方路口有 3 条左转车道),才能制定变道、超车、转弯等策略; -
保障控制精度:根据车辆与车道中心线的横向偏差,调整转向角度,确保车辆稳定行驶在车道内,避免跑偏。
六、总结:定位是自动驾驶的 “地基”
自动驾驶汽车的定位,是 “卫星定位提供全局参考 + 惯性 / 里程传感器维持短期稳定 + 视觉 / 激光传感器捕捉局部特征 + 高精地图实现车道锁定 + 数据融合保障精准可靠” 的系统工程。它看似只是 “确定位置”,实则需要多硬件、多算法的深度协同,还要应对极端天气、信号遮挡、地图失配等各种复杂场景。
只有实现 “全天候、全场景、高精度” 的定位,自动驾驶汽车才能放心地做出决策、平稳地执行控制,最终实现安全可靠的行驶。
转载请注明:可思数据 » 自动驾驶定位解密:从 “在哪条路” 到 “哪条车道” 的精准判定
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


