
 |
在自动驾驶系统的 “感知 - 规划 - 控制” 全链路中,轨迹预测常被视为 “隐形桥梁”—— 它不像传感器那样直观可见,也不像规划控制那样直接决定车辆动作,却直接决定了自动驾驶的安全性、流畅性与用户体验。忽视轨迹预测,自动驾驶车辆终将沦为 “被动反应者”,难以应对复杂道路的动态变化;而重视并做好轨迹预测,才能让车辆具备 “预判未来” 的能力,实现从 “能开” 到 “开好、开稳” 的核心跨越。
一、为什么轨迹预测是自动驾驶的 “刚需”?
1. 破解 “被动反应” 的安全困境
真实道路充满不确定性:路口等待的车辆可能突然左转、路边行人可能横穿马路、高速上邻车可能违规加塞。如果没有轨迹预测,自动驾驶系统只能基于 “当前瞬间的环境快照” 做决策 —— 当突发状况出现时,留给车辆刹车、避让的反应时间极短,很容易因应对不及引发碰撞事故。
例如,当行人靠近马路边缘时,轨迹预测能提前 3-5 秒预判其 “是否会横穿” 及 “横穿速度”,让规划模块提前调整车速、预留避让空间;而缺乏预测的系统,可能要等到行人迈出脚步才开始反应,此时即使紧急制动,也可能因距离过近无法避免危险。

2. 平衡安全、效率与舒适性的核心抓手
自动驾驶的终极目标不是 “慢而安全”,而是在绝对安全的前提下,兼顾行驶效率与乘坐舒适性。轨迹预测通过提供 “未来场景的概率分布”,让规划模块有足够时间做最优决策,而非只能采取保守的 “防御性驾驶”。
-
高速场景中:提前预测前车的减速意图或邻车的变道倾向,车辆可平稳调整车速、选择最佳车道,避免频繁急刹或加速; -
城市道路中:预判路口信号灯变化、对向车辆的让行意愿,能优化转弯时机与跟车距离,既不浪费通行效率,也不会因突然避让导致乘客顿挫。
反之,没有轨迹预测的系统,为了安全只能过度保守 —— 比如保持极远的跟车距离、拒绝一切复杂路口的超车机会,不仅降低道路利用率,也会让用户体验大打折扣。
3. 应对 “多主体交互” 的复杂场景
道路是典型的 “多主体强交互” 环境:车辆、行人、骑行者的行为相互影响(如我方加速可能阻止邻车变道,邻车让行可能让行人更敢于横穿)。轨迹预测的核心价值之一,就是建模这种交互关系,让车辆理解 “自身行为与他人动作的关联”。
例如,在无保护左转场景中,轨迹预测需要同时预判:对向直行车辆的速度与让行意图、横向行人的移动轨迹、非机动车的绕行路径,规划模块才能基于这些多维度预测,选择 “何时启动左转”“如何调整车速避让”,而不是盲目等待或冒险抢行。
二、轨迹预测的核心价值:不止是 “画一条线”
1. 提供 “多可能性 + 概率” 的决策依据
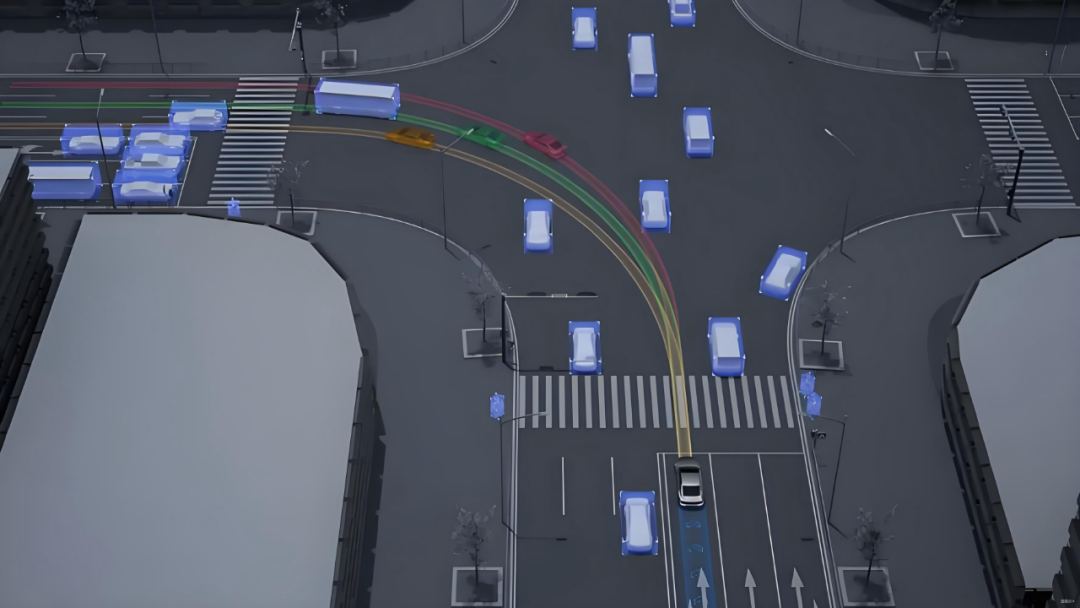
高质量的轨迹预测绝非 “按当前速度画直线”,而是综合物理约束(如车辆动力学、道路几何)、场景语义(如车道线、红绿灯、交通标志)、多主体交互(如邻车意图、行人行为),输出多条可能的未来轨迹及对应的发生概率。
这种 “多模态预测” 比单一 “平均轨迹” 更安全:比如路口停着的车辆,可能直行(概率 60%)、左转(概率 30%)或掉头(概率 10%),预测模块会将这三条轨迹及概率同步给规划模块。规划模块可基于 “最坏情况”(左转)预留安全距离,同时兼顾 “最可能情况”(直行)保证效率,避免因单一预测失误导致决策偏差。
2. 适配不同时间尺度的决策需求
轨迹预测需覆盖 “短期 - 中期 - 长期” 全时间尺度,分别支撑不同层级的决策:
-
短期预测(0.5s-3s):聚焦 “即时安全”,比如预判前车是否会急刹、行人是否会突然冲出,要求误差小、实时性高,直接影响控制层面的刹车力度、转向角度调整; -
中期预测(3s-10s):支撑 “策略级决策”,比如预判前方路口是否会拥堵、邻车是否会长期占用快车道,用于优化变道时机、路线选择; -
长期预测(10s 以上):服务 “路径规划”,比如预判高速出口的车流状况、施工路段的通行效率,用于调整整体行驶路线,平衡时间成本与安全风险。
工程实践中,通常采用 “分层预测策略”:短期用轻量模型保证实时响应,长期用复杂模型提升预测精度,确保不同场景下的决策需求都能被满足。
3. 降低规划与控制的复杂度
轨迹预测将 “不确定的未来” 转化为 “可量化的候选场景”,让规划模块无需处理所有未知情况,只需在预测的 “可能轨迹集合” 中选择最优路径。这大幅降低了规划算法的计算复杂度,让车辆在复杂场景下也能快速输出安全、合理的决策。
例如,在拥堵路段的跟车场景中,轨迹预测会提前预判前车的加速、减速规律,规划模块可基于此生成平滑的跟车轨迹,避免频繁调整动作;而没有预测的系统,需要不断根据前车的实时动作 “被动修正” 轨迹,既增加计算压力,也影响行驶稳定性。
三、忽视轨迹预测的代价:安全与体验的双重妥协
1. 安全风险剧增
-
动态障碍物应对不足:无法预判行人、非机动车的突发动作,易引发碰撞; -
多主体交互误判:误判邻车变道意图、对向车辆让行意愿,导致抢行或避让不当; -
极端场景应对失效:在施工路段、临时交通管制等场景中,因无法预判交通参与者的行为变化,难以制定合理决策。
2. 行驶体验与效率双降
-
舒适性差:频繁急刹、急加速、突然转向,让乘客产生顿挫感; -
效率低下:过度保守的跟车距离、错失最佳变道时机,导致通行效率低于人类驾驶; -
决策逻辑混乱:在复杂路口因无法预判多方行为,出现犹豫、反复调整动作的情况。
四、总结:轨迹预测是自动驾驶的 “核心竞争力”
轨迹预测的本质,是让自动驾驶系统从 “被动感知” 升级为 “主动预判”—— 它不仅是感知与规划之间的 “数据转换器”,更是系统安全、效率、舒适性的 “底层支撑”。在多主体、强交互、高动态的道路环境中,没有高质量的轨迹预测,再先进的传感器也只能 “看清眼前”,再智能的规划算法也只能 “被动应对”。
随着自动驾驶向高阶演进,轨迹预测的重要性将愈发凸显:从 L2 级辅助驾驶到 L4 级完全自动驾驶,对 “预判未来” 的精度、速度、鲁棒性要求会持续提升。未来,轨迹预测的竞争将不再是 “是否能预测”,而是 “能否在复杂场景下精准预测多主体的交互行为”。
因此,重视轨迹预测,投入资源攻克其技术难点(如多模态预测、交互建模、实时性优化),不仅是提升自动驾驶安全性的必然选择,更是构建技术壁垒、实现商业化落地的关键所在。
转载请注明:可思数据 » 自动驾驶轨迹预测:从被动应对到主动安全的关键一跃
免责声明:本站来源的信息均由网友自主投稿和发布、编辑整理上传,或转载于第三方平台,对此类作品本站仅提供交流平台,不为其版权负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本站联系,我们将及时更正、删除,谢谢。联系邮箱:elon368@sina.com


